U 型结构背后的玄机:陕西冠杰光电转台如何实现 360° 无死角监控
陕西冠杰 U 型光电转台的 360° 无死角监控能力,并非简单的机械转动叠加,而是 U 型结构与多技术模块深度协同的结果。这种开放式框架设计突破了传统云台的封闭结构局限,通过力学优化、驱动革新与智能补偿,构建起覆盖水平全周、垂直全域的监控网络,其背后暗藏着精密的机械设计与智能控制逻辑。
U 型框架的力学解构为无死角监控奠定基础。不同于传统云台的封闭式壳体,U 型结构采用 “双悬臂 + 中空贯通” 设计,水平轴从框架中心贯穿而过,彻底消除了转动时的结构遮挡。框架采用钛合金整体锻造,经有限元分析优化应力分布,在保证抗扭强度达 350MPa 的同时,将自身重量减轻 40%,为高速转动提供轻量化基础。水平轴与垂直轴的交点设置在框架重心位置,使转台在 360° 旋转时的离心力偏差控制在 ±2N 以内,避免因重心偏移导致的抖动。这种结构设计让转台在水平方向实现 “零遮挡连续旋转”,配合垂直轴 - 90° 至 + 90° 的摆动范围,形成球形监控空域,从物理层面消除了传统设备因结构阻挡产生的监控盲区。
双轴驱动系统的协同控制实现无缝角度衔接。水平轴搭载稀土永磁伺服电机与谐波减速器组合,传动间隙≤0.001mm,可实现 0.0001°/ 步的精密转动,确保 360° 旋转过程中每一度都能精准定位。垂直轴采用交叉滚子轴承支撑,配合高精度滚珠丝杠驱动,俯仰角度重复定位误差≤0.002°,在从 - 90°(俯视地面)到 + 90°(仰视天顶)的切换中,无任何角度跳跃。双轴驱动采用 “电子齿轮同步” 技术,当追踪低空掠过的无人机时,水平轴以 60°/s 的速度旋转,垂直轴同步以 45°/s 的速度抬升,两者的速度比通过实时算法动态调整,确保目标始终处于画面中心。这种协同控制使转台在任意角度组合下都能保持稳定输出,避免了传统云台双轴联动时的卡顿与角度丢失。
智能角度补偿算法破解复杂场景的监控难题。针对安装面倾斜(如楼顶斜坡、山地基站)导致的监控角度偏移,U 型转台内置三轴陀螺仪与倾角传感器,实时监测设备姿态,通过算法自动计算横滚轴补偿量,即使安装面倾斜 30°,仍能通过 ±15° 的横滚调整,使监控画面保持水平。在追踪高速移动目标时,基于卡尔曼滤波的预测算法可提前 0.5 秒计算目标运动轨迹,驱动双轴系统预调角度,当目标突然变向时,补偿误差≤0.05°,确保不丢失监控目标。针对多台转台协同监控的场景,系统通过时间戳同步技术,使不同设备的角度数据偏差控制在 5ms 内,当目标从 A 转台监控范围进入 B 转台区域时,角度衔接无缝隙,实现跨设备的无死角接力追踪。
动态平衡与振动抑制保障极端环境下的角度精度。U 型框架的动态平衡设计使转台在 12 级风力下的振幅≤0.1mm,配合主动减振装置,可过滤 90% 以上的外界振动干扰。在高速公路旁部署时,即使遭遇大型货车驶过产生的地面共振,转台仍能保持角度稳定,监控画面抖动幅度≤1 像素。针对温度变化导致的机械形变,系统通过温度传感器实时采集环境数据,算法自动修正双轴驱动参数 —— 在 - 55℃低温环境下,补偿金属收缩导致的传动误差;在 70℃高温下,调整电机输出功率以抵消热损耗。这种环境自适应能力,确保 U 型转台在任何工况下都能维持 360° 无死角监控的精度。
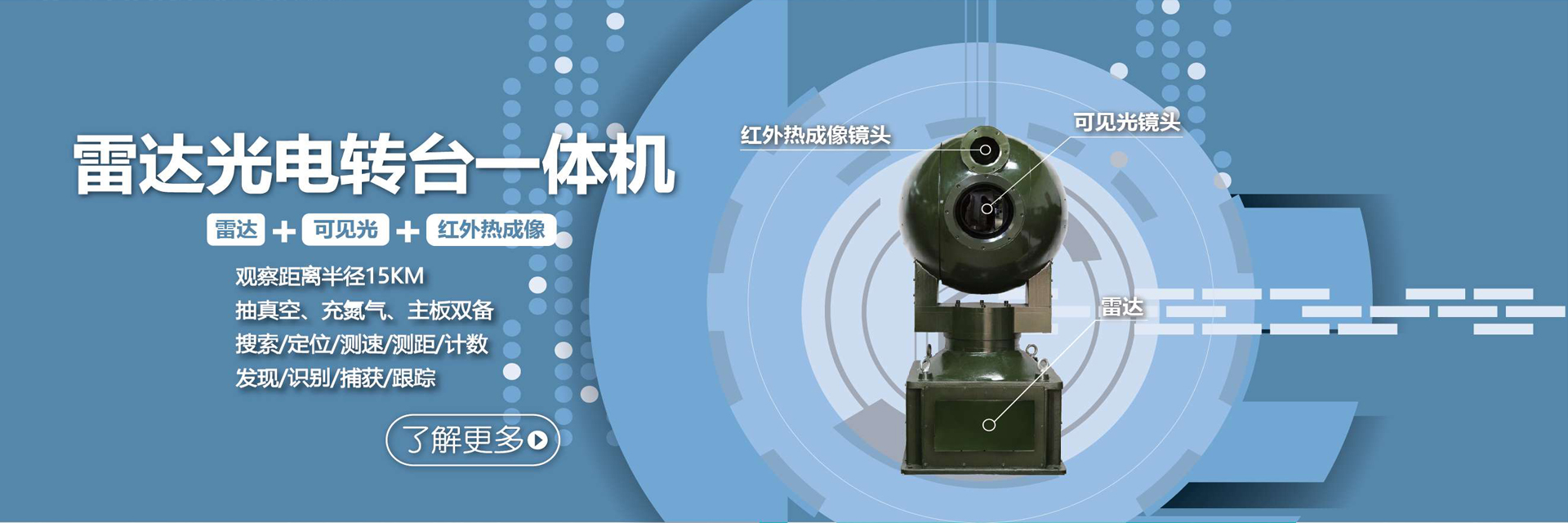
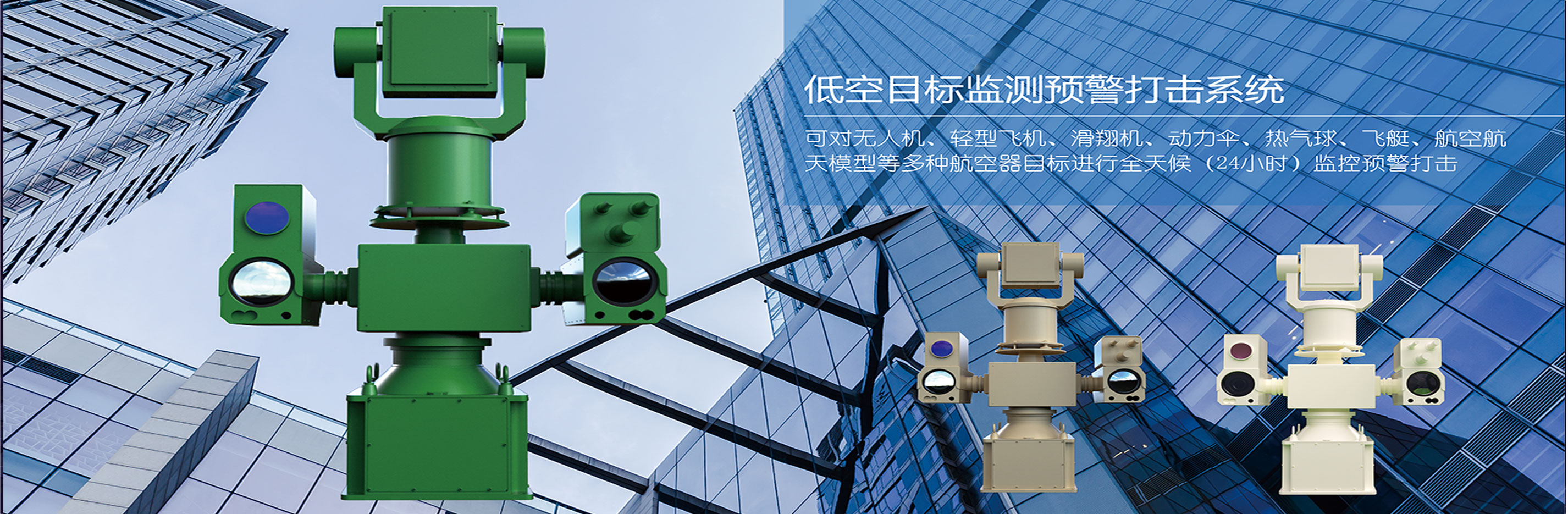
多传感器的视场融合拓展无死角监控维度。U 型转台可集成 4K 可见光、红外热成像与激光雷达等多类传感器,通过 “视场拼接算法” 将不同传感器的监控范围融合为球形视场。当监测远距离目标时,可见光相机负责中心视场的细节识别,红外热成像覆盖周边 30° 范围的热源探测,激光雷达则提供全向三维点云数据,三者的视场边缘通过像素级对齐,消除传感器间的监控缝隙。在边境线监控中,这种多视场融合技术使转台既能锁定 8 公里外的徒步人员(可见光),又能探测其周围 50 米范围内的隐蔽热源(红外),同时通过激光雷达确认地形障碍(如沟壑、树木)对监控的影响,实现 “点 - 面 - 体” 的全方位无死角感知。




